多重チューブ推進機構
伸縮性のある複数のチューブを束ねて,それぞれのチューブに周期的に圧力をかけて駆動すると,様々な運動が行なえます.
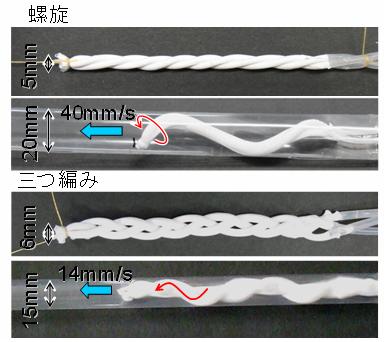
チューブを螺旋状に束ねて駆動すると胴体全体が螺旋形状になって捻転運動を行なう螺旋捻転運動となります.
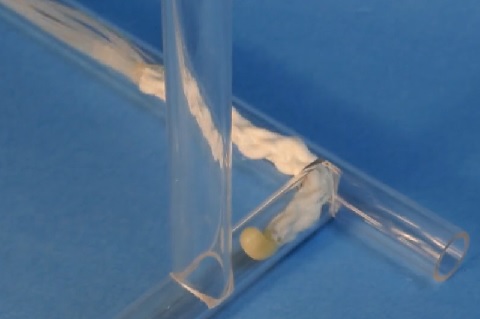
螺旋捻転運動を管内で行うと螺旋状に転がって推進することができます.
螺旋捻転運動は柔軟な胴体のため屈曲部を容易に通過でき,無限回転部位を必要としないため気密性が高く,
タイヤによる移動装置やミミズの蠕動運動と比べて管の内壁に対してスリップを起こさないため安全で,
螺旋状になって管の内壁に張り付くため,流路を塞がないという利点を持ちます.
またチューブを三つ編みにして駆動する方式でも蛇のような屈曲動作による推進ができます.
管内検査ロボットや軟性内視鏡の推進装置等への応用を目指して開発をしています.
押し出し加工で作成すると低コストで使い捨てができるようになり,汚染されたパイプ等で利用することも可能となります.
<動画>空気圧式螺旋捻転移動装置(1.5MB)
<動画>空気圧式三つ編み屈曲移動装置(3.2MB)
さらに六つ編みにすると管内で任意の方向を向いたり,分岐管で好きな方向に進むことも可能となります.
<動画>六つ編み駆動管内移動装置(4.5MB)
編みチューブ式アクチュエータ
チューブを軸索としてではなく,円筒形に編み中に軸を通すと,中に通した軸を軸方向及び回転方向に自在に駆動することが可能です.
試作装置では腹腔鏡下手術で用いる内視鏡の駆動に成功しました.
電磁気の使えないMRI環境下等で利用可能なアクチュエータを目指して開発しています.

<動画>軸周り回転動作(1MB)
<動画>軸方向直動動作(0.8MB)
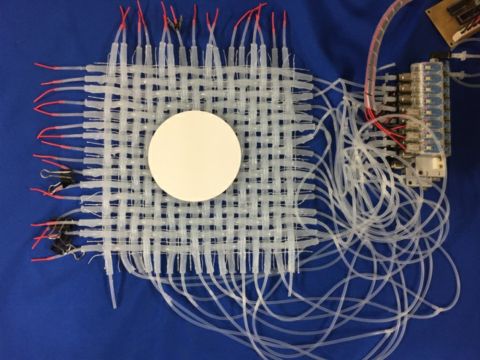
また,チューブを面状に編んで駆動すると,上に載せたものを運んだり,装置自体が地面を這って移動したりすることも可能です.
にょきにょき
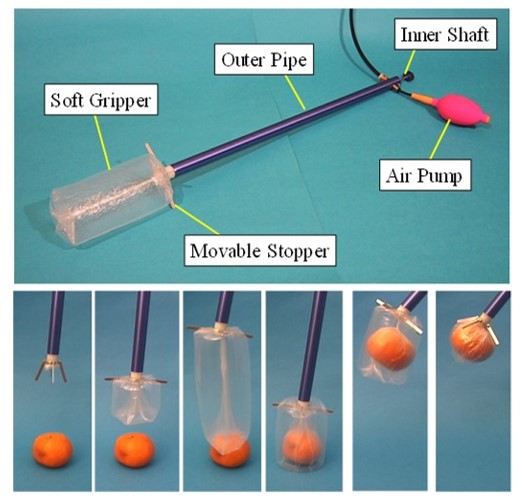
筒状の長い袋を加圧しつつ,端部を内側に引っ張りこむと端部から物を包み込むように把持ができます.
さらに内部に引き込んだ袋を捩じり,空気を抜くと,把持対象物をコンパクトに袋の中に閉じ込めることができます.
袋を展開するまでは細長い筒の中に収納し,把持時には膨らんで大きなものを把持できることから,
惑星ローバーでの鉱石採集や腹腔鏡下手術での切除した臓器の回収等に応用できると考えています.
その動作の様子からにょきにょきと名付けられました.
<動画>引き込み式バルーングリッパ(0.6MB)
研究紹介Top