高速高把持力省エネルギーロボットハンド
ギヤードモータは,ギヤ比を小さくすると速度は出ますが力が出せず,ギヤ比を大きくすると力は出ますが速度が出せません.
そのため変速機が有効になるのですが,ロボットハンドのような小型の機構に利用可能な変速機はありません.
そこで早さと力強さを両立できる駆動系の開発しています.
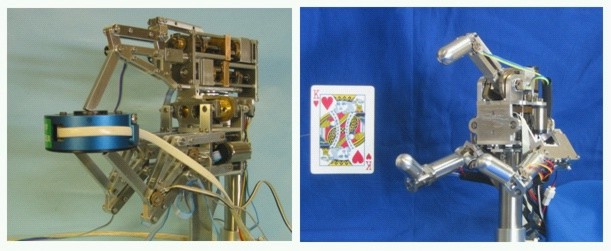
多指ロボットハンド100N Hand
特許出願:把持装置 特開2010-23185
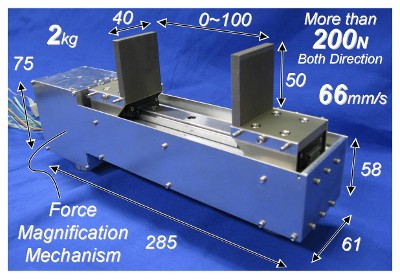
把持力増大機構を搭載して100Nという大把持力が出力できる重量約1kgの3指8自由度ハンドを開発しました.
このハンドは速度と力を異なるモータが分担する把持力増大機構という機構を用いることで速度と力の両立をしています.
把持力増大機構はトグル機構を用いているので,大把持力出力時のエネルギー消費がゼロとなります.
<動画>100N Hand(2.1MB) &
100N Hand II(1.5MB)
本ハンドに用いている把持力増大機構はウォームギヤの使い方に特徴があります.
この機構は一つの関節を動かすのにギヤ比の小さい高速低トルクモータ(M1)と,
ギヤ比の大きい低速高トルクモータ(M2)の二つの小さいモータを用いています.
まずM1でウォームギヤを高速に駆動して指を高速に動作させます.
指が把持対象物に接触したらM1を止め,M2を駆動して立体トグル機構を駆動します.
立体トグル機構はモータM1を後方より強く押し,ウォームスクリューを軸方向に押します.
するとウォームホイールは強い力で回転させられ,指先を把持対象物に押し付けます.
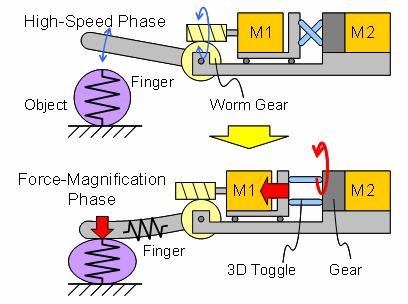
把持力増大機構は力を出したときに高速駆動部がバックドライブしないようウォームギヤを用います.
そのため高速駆動時に機構的にコンプライアンスの無い構造となっています.
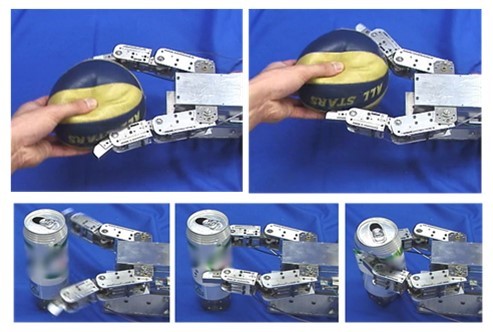
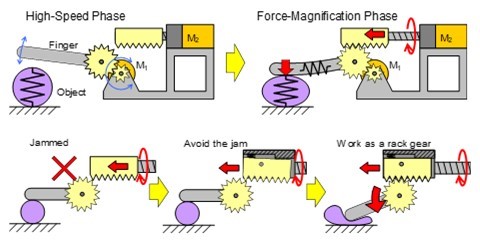
そこで高速駆動時にコンプライアンスの出せる把持力増大機構を備えたハンドの開発も行いました.
本把持力増大機構は高速駆動時には高トルク駆動のラックギヤが切り離されており,高トルク駆動時にギヤがかみ合う構造となっています.
ラックギヤがかみ合う際に刃先どうしが接触するとギヤが動けなくなってしまうため,
ラックギヤが傾いて干渉を回避する機構を開発しました.
大把持力が得られる直動機構
特許出願:開閉両方向に力を出せる把持装置 特許第4581117号
トグル機構を用いた把持力増幅装置ではその構造上片方向(閉じる方向)にしか大きな把持力が出せません.
しかし工場で用いられる平行グリッパは閉じて掴むだけでなく,隙間に爪を差し込んで開く力で把持する必要もあります.
そこで開閉両方向に大きな把持力を出せる平行グリッパを開発しています.
干渉駆動を用いた変速装置
特許出願:干渉駆動式変速機及びこれを用いた干渉駆動式変速駆動装置 特開2017-096359
把持力増大機構はロボットハンドの限られた関節動作範囲での使用に適していますが,
ウォームギヤを軸方向に駆動するため,無限回転する装置には利用できません.
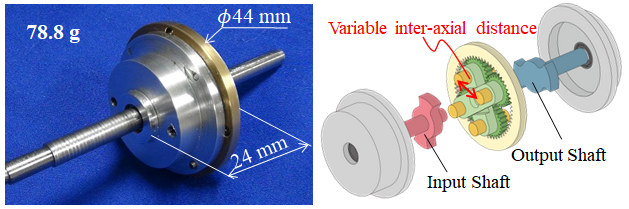
そこで二つのモータの干渉駆動を用いて,モータの回転方向によって変速する変速装置を開発しています.
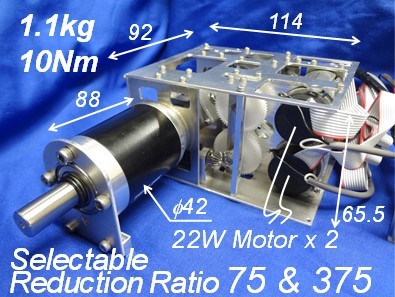
本装置はディファレンシャルギヤを用いて二つのモータの入力で干渉駆動を実現しています.
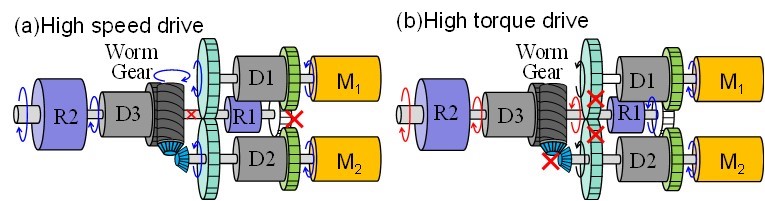
原理を以下に示します.モータ1とモータ2の出力はディファレンシャルギヤボックスD1とD2に入力されます.
D1とD2の出力軸につけられたギヤは直接接続され,D1とD2そのものにつけられたギヤは奥のギヤを介して接続されており,
モータ1とモータ2が逆方向に回転するとD1とD2の出力軸が回転でき,
モータ1とモータ2が同方向に回転するとD1とD2自体が回転できます.
出力軸が回転した場合はD3のギヤボックスに取り付けられたウォームギヤを駆動し,
D1とD2自体が回転した場合はD3の入力軸を減速機R1を介して駆動します.
これによってD3の出力軸が駆動され,最終ギヤR2を介して出力軸を駆動します.
<動画>干渉駆動変速装置(2.6MB)
上記方法では高トルク駆動によって高速駆動部が逆転しないように,高速出力と高トルク出力の合流部にバックドライブしない機構としてウォームギヤを用いました.
一方,ウォームギヤは減速比が大きいため,高速駆動でも減速してしまい,高速駆動と高トルク駆動での変速比を大きくすることが出来ませんでした.
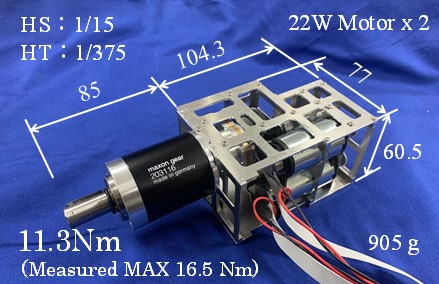
そこで下記ツーウェイクラッチを用いることで,大変速比を実現しました.
ツーウェイクラッチ(ロックタイプ)
特許出願:ツーウェイクラッチ 特開2023-070915
高速動作と高トルク動作を両立させる場合,高トルクの駆動力に低トルクの高速駆動部が逆転しないよう,
入力側から駆動させた場合には出力が回転し,出力側から駆動させた場合には軸がロックするツーウェイクラッチが必要になります.
一般的なツーウェイクラッチは摩擦を利用しているため高速回転できず,高速駆動部に組み込むのに適していませんでした.
そこで高速回転可能なツーウェイクラッチを開発しました.
<動画>ツーウェイクラッチ動作模型(2.6MB)
研究紹介Top